Section 1: The Problem
Search and rescue is a race against time. The FBI reported 533,936 missing-person records entered into NCIC in 2024, with 93,447 active missing-person records still in the system on December 31, 2024 (FBI).
Wilderness searches are especially hard. A missing person may be under trees, behind rocks, injured, unconscious, or moving away from the original search area. Every hour adds more ground to cover. Traditional teams use maps, dogs, helicopters, foot searchers, and radio coordination, but those tools still depend on people seeing a small human shape in a huge landscape.
Drones help by covering dangerous or remote terrain without sending rescuers into every ravine first. AI adds the missing piece: automatic human detection. Instead of forcing a pilot to scan hours of video, a model can flag likely people, heat signatures, phones, or movement patterns for review.
Section 2: What Research Shows
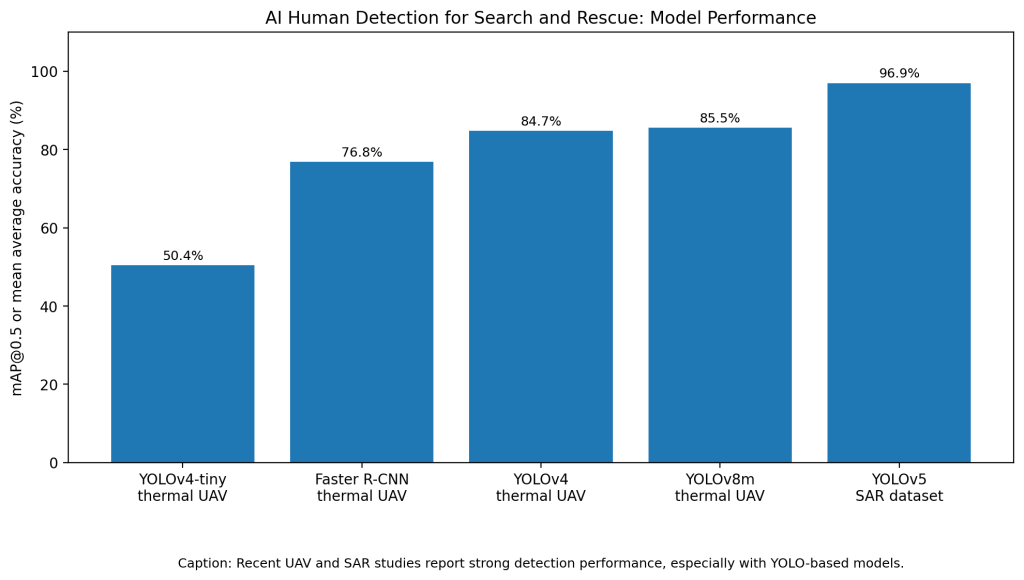
Computer vision models already perform well in controlled search-and-rescue datasets. Bachir and Memon tested YOLOv5 on search-and-rescue imagery and reported a highest mean average accuracy of 96.9%, outperforming YOLOv4 and R-CNN-based approaches (Bachir and Memon).
Thermal models also show promise. Soeleman, Supriyanto, and Purwanto tested UAV thermal object detection on the HIT-UAV dataset of 2,898 images. YOLOv8m reached 0.855 mAP@0.5, beating YOLOv4-tiny at 0.504, Faster R-CNN at 0.768, and YOLOv4 at 0.847 (Soeleman et al.).
The research field is now large enough for recent surveys. Zhang and colleagues reviewed aerial person detection for search and rescue in 2025 and framed it as a core technology for finding people in remote or hazardous environments (Zhang et al.).
Section 3: What the Real World Shows
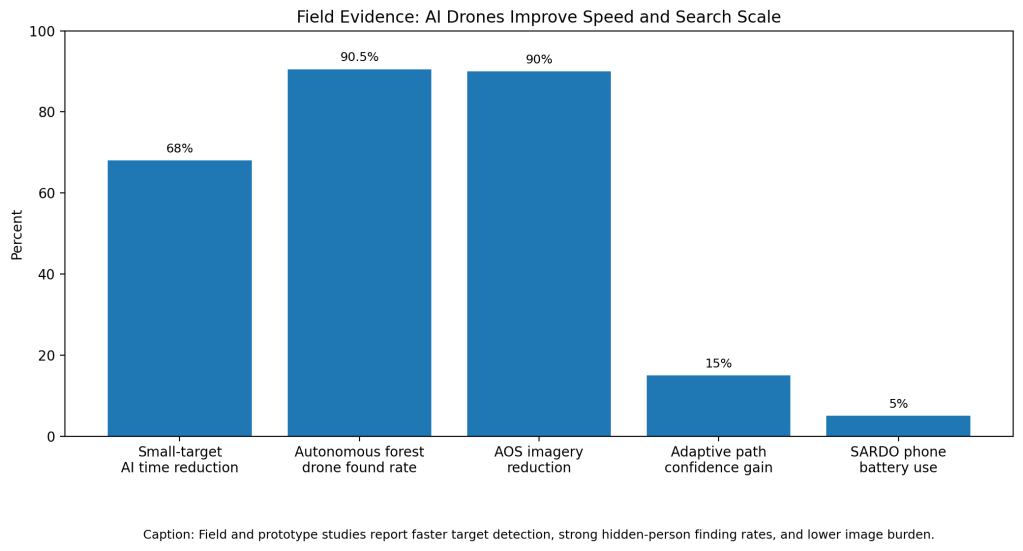
Some field tests show clear speed gains. Yun and colleagues built a small-target detection system for the U.S. Coast Guard using UAV and surveillance imagery. Their system detected a target in 8 seconds, while the human eye took 25 seconds, a 68% reduction in detection time (Yun et al.).
Schedl, Kurmi, and Bimber tested an autonomous drone in 17 forest field experiments. The drone found 38 of 42 hidden people, or 90.5%. The system processed images onboard in real time, and adaptive path planning increased confidence by 15% (Schedl et al.).
SARDO tested a different idea: use a drone as a temporary mobile-network search tool. In field trials, it localized phones in about 3 minutes per user device with accuracy within a few tens of meters and about 5% phone battery cost (Albanese et al.).
Section 4: The Implementation Gap
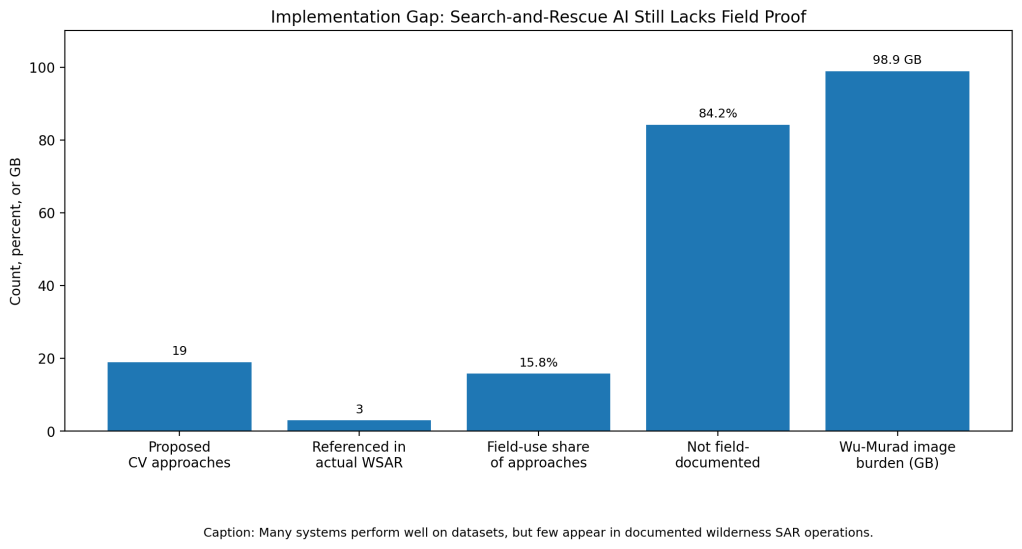
The first barrier is real-world transfer. Manzini and Murphy tested computer vision on 98.9 GB of drone imagery from the Patricia Wu-Murad wilderness search in Japan. A model that looked strong on datasets failed in practice through false positives, such as tree limbs and rocks, and false negatives, such as missing search-team members (Manzini and Murphy).
The second barrier is lack of field proof. Manzini and Murphy found at least 19 proposed approaches and 3 datasets for locating missing people in drone imagery, but only 3 approaches were referenced in actual wilderness search-and-rescue operations. That means most research still lives closer to the lab than the field (Manzini and Murphy).
The third barrier is regulation and operations. The FAA says Part 107 pilots may fly at night, over people, and over moving vehicles without a waiver only when they meet defined rules, and airspace authorization still applies in controlled airspace (FAA). BVLOS operations still require special approval, which matters because large-area searches often need drones beyond a pilot’s direct visual range (FAA).
The fourth barrier is weather, terrain, and signal loss. Drones lose value when trees hide people, batteries run low, wind rises, or the search zone lacks connectivity. The strongest systems handle this by processing data onboard instead of relying on stable internet.
Section 5: Where It Actually Works
AI drones work best as rapid triage. They should not replace search commanders or ground teams. They should mark likely targets, reduce video overload, and send rescuers toward higher-probability areas first.
The strongest examples share one pattern. Schedl’s drone processed images onboard. SARDO did not rely on normal cell infrastructure. Dumenčić and colleagues tested UAV search with 78 volunteers in a real Mediterranean karst environment instead of only simulated terrain (Dumenčić et al.).
Section 6: The Opportunity
The opportunity is not a robot replacing rescuers. It is a faster first pass over dangerous terrain, with AI flagging clues before human teams lose daylight.
References
[1] Federal Bureau of Investigation. 2024 NCIC Missing and Unidentified Person Statistics. 2025.
[2] Bachir, Namat, and Qurban Ali Memon. “Benchmarking YOLOv5 Models for Improved Human Detection in Search and Rescue Missions.” Journal of Electronic Science and Technology, 2024.
[3] Soeleman, Moch Arief, Catur Supriyanto, and Purwanto. “Deep Learning Model for Unmanned Aerial Vehicle-Based Object Detection on Thermal Images.” Revue d’Intelligence Artificielle, 2023.
[4] Zhang, X., et al. “Aerial Person Detection for Search and Rescue: Survey and New Perspectives.” Remote Sensing, 2025.
[5] Yun, Kyongsik, et al. “Small Target Detection for Search and Rescue Operations Using Distributed Deep Learning and Synthetic Data Generation.” arXiv, 2019.
[6] Schedl, D. C., I. Kurmi, and O. Bimber. “An Autonomous Drone for Search and Rescue in Forests Using Airborne Optical Sectioning.” arXiv, 2021.
[7] Albanese, Antonio, Vincenzo Sciancalepore, and Xavier Costa-Pérez. “SARDO: An Automated Search-and-Rescue Drone-Based Solution for Victims Localization.” arXiv, 2020.
[8] Manzini, Thomas, and Robin Murphy. “Open Problems in Computer Vision for Wilderness SAR and The Search for Patricia Wu-Murad.” arXiv, 2023.
[9] Dumenčić, Stella, et al. “Experimental Validation of UAV Search and Detection System in Real Wilderness Environment.” Drones, 2025.
[10] Federal Aviation Administration. “Certificated Remote Pilots Including Commercial Operators.” 2025.

Leave a comment