Section 1: The Problem
Trash is getting more expensive, and not only because there is more of it.
Global municipal solid waste is projected to rise from 2.1 billion tonnes in 2023 to 3.8 billion tonnes by 2050, and the direct global cost of waste management was already about USD 252 billion in 2020. When pollution, health damage, and climate costs are included, that annual cost rises to USD 361 billion and could approach USD 640.3 billion by 2050 without major changes (UNEP).
Plastic is one of the clearest failures in that system. In the United States, only about 8.4% of plastics were recycled in 2017, and recycling plants still lose value because mixed, dirty, or look-alike items are hard to separate cleanly (Lubongo et al.; EPA data summarized in industry reporting). At many material recovery facilities, workers and standard optical sorters still miss items, confuse similar packaging, or send valuable material into residue streams because the waste arrives overlapped, bent, contaminated, or unlabeled (Lubongo et al.; Single et al.).
That is where data science fits. Computer vision, hyperspectral imaging, and machine learning can classify plastic type, color, and contamination patterns far faster than manual lines. In recent reviews, automated systems were reported to sort up to 160 items per minute, while manual systems often handle only 30 to 40 items per minute. The gap matters because every missed sort lowers bale quality, cuts resale value, and raises disposal costs downstream (Fotovvatikhah et al.).
Section 2: What Research Shows
The retrospective evidence is strong, but it comes with a warning.
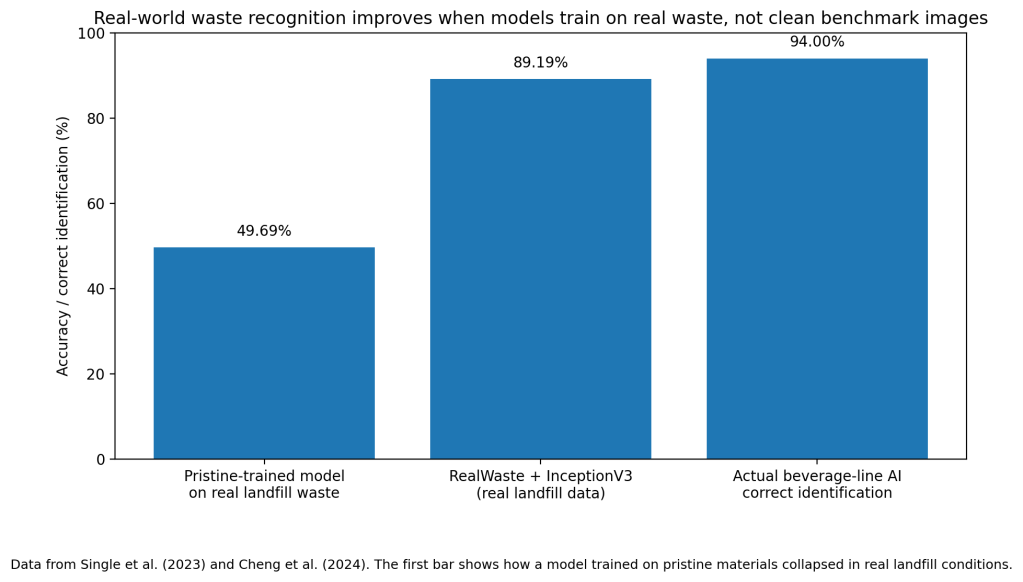
Single and colleagues built the RealWaste benchmark to test what happens when waste models leave clean lab images and face actual landfill material. A model trained on pristine materials collapsed to 49.69% accuracy in the real environment. When the researchers trained on the real-world RealWaste dataset instead, Inception V3 reached 89.19% accuracy across the full label set needed for landfill modeling. That is one of the clearest demonstrations in this space: the model can work, but only if the data look like the mess it will face in practice (Single et al.).
Plastic-specific systems show similar gains. Giel and coauthors built a real-time identification system for mixed plastic streams using more than 4,000 self-built images with contamination included. Their YOLOv5-based setup reached recall of 0.9948, precision of 0.984, mAP@0.5 of 0.9967, and mAP@0.5:0.95 of 0.8968 under test conditions designed to mirror actual sorting lines (Giel et al.). Lubongo’s 2024 review also reports that ML combined with spectroscopy can push classification accuracy above 99% in some controlled polymer-identification tasks, while neural-network optical systems have beaten older optical sorters on difficult look-alike plastics (Lubongo et al.; Giel et al.).
The broader literature now looks mature. Fotovvatikhah et al.’s 2025 systematic review covered more than 97 studies published from 2020 to 2025 and found that CNN-based and hybrid systems dominate the field. Lubongo et al.’s 2024 review reaches a similar conclusion for plastics specifically: the research has moved well beyond proof of concept, and the real bottleneck is deployment inside messy, high-volume plants rather than raw model performance alone (Fotovvatikhah et al.; Lubongo et al.).
Section 3: What the Real World Shows
The real world does not look like benchmark images, but the results are still promising.
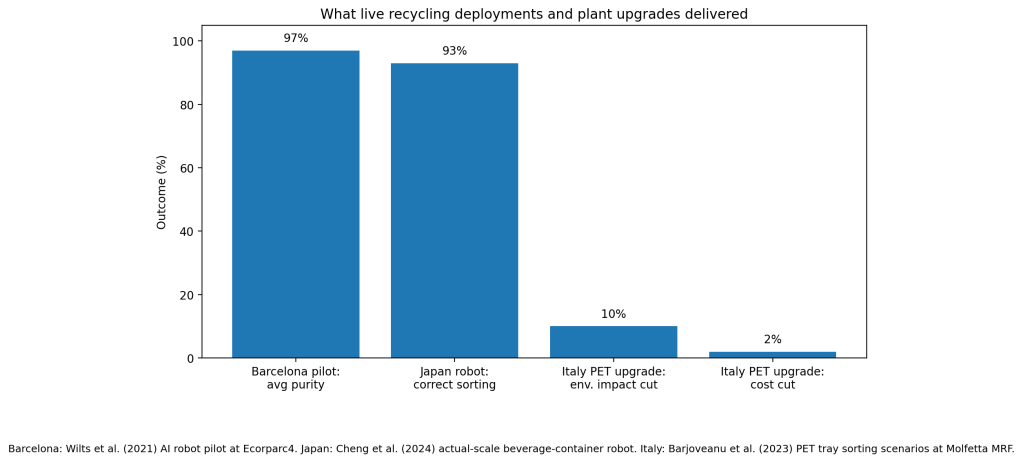
Wilts and coauthors reported one of the strongest plant-level pilots in this area. At the Ecorparc4 municipal waste sorting plant near Barcelona, which handles about 300,000 tons of municipal waste per year, researchers installed a ZenRobotics ZRR2 system and trained it on 13 material streams. The pilot used 500 to 1,000 pieces per fraction for robot training and evaluation. After iterative tuning, the system reached average purity of 97% across the 13 waste streams tested, with some fractions reaching up to 100% purity. The weak spot was recovery, not purity. Some materials, like textiles, saw recovery of only about 13%, which means the robot often produced clean output but still left too much valuable material behind (Wilts et al.).
Japan shows the same pattern from a different angle. Cheng and coauthors built an actual-scale beverage-container sorting robot using image recognition AI, a suction gripper, and color sorting for glass. In real-machine experiments, the AI recognition system made errors on 6% of inputs, and the full robot maintained a 93% correct sorting rate among successfully picked items. The system reached a maximum speed of 45 picks per minute. That is slower than some commercial systems, but it proves that mixed PET bottles, cans, and colored glass can be sorted on a working line with high accuracy. The limiting factor was not image recognition alone. It was the full chain of detection, gripping, timing, and conveyor stability (Cheng et al.).
Italy adds a more economic view. Barjoveanu and colleagues modeled PET tray sorting upgrades at a real material recovery facility in Molfetta, Southern Italy. Their upgraded scenarios cut overall environmental impacts by about 10% and reduced costs slightly, under 2%, by avoiding contamination fines in PET output streams. That is less dramatic than a robot pilot headline, but it matters because it shows plant managers can gain financially even when gains look modest on paper (Barjoveanu et al.).
Section 4: The Implementation Gap
So why is this not normal yet?
The first problem is dirty reality. Wilts et al. found that multilayer waste, overlapping items, dust, organics, and unstable inflow all hurt detection and picking. In Barcelona, the robot achieved high purity but weaker recovery because municipal waste did not arrive in the neat monolayer conditions that the system handled best. Long, flexible items such as textiles and films created gripping problems, and throughput gains depended on redesigning feed conditions, not only updating the model (Wilts et al.).
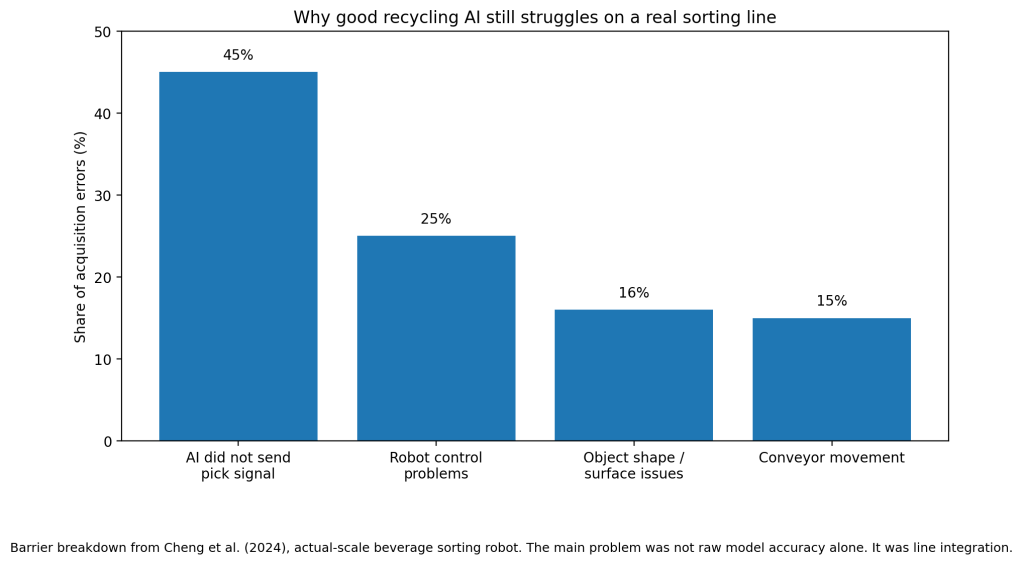
The second problem is that strong model metrics do not guarantee line performance. Cheng et al. broke down acquisition errors in their actual-scale robot and found that 45% came from the AI not sending a picking signal, 25% from robot control problems, 16% from object shape and surface issues, and 15% from conveyor movement. In other words, the main failure mode was system integration. A high-precision detector still fails if the gripper misses, the belt shifts, or two items arrive together (Cheng et al.).
The third problem is economics. Lubongo et al. note that many automated systems work best at medium to high facility volumes, while problematic materials such as film, multilayer plastics, dark plastics, and mixed-polymer items still deliver weak returns. Plants have to decide whether expensive sensors and robots will pay back before commodity prices fall again. That is a hard sell in a sector with thin margins (Lubongo et al.).
The fourth problem is data. Single et al. showed how easily performance collapses when models trained on clean datasets face real waste. This field still suffers from dataset imbalance, weak standardization, and too many benchmark images that look nothing like a live conveyor. That is why many papers report excellent numbers while plants still struggle on the floor (Single et al.; Fotovvatikhah et al.).
Section 5: Where It Actually Works
It works best where the task is narrow and the plant is willing to redesign the process around the tool.
Barcelona’s pilot worked when the robot got a better feed profile and focused on specific fractions. Japan’s robot worked because the waste category was constrained to beverage containers and the team measured not only recognition but full-machine sorting behavior. Italy’s PET-tray study worked because the problem was not “fix recycling” in general. It was one specific contamination source inside one real facility (Wilts et al.; Cheng et al.; Barjoveanu et al.).
The pattern is simple. Plants succeed when they treat AI sorting as a line-design problem, not only a model problem.
Section 6: The Opportunity
AI sorting has already shown that recycling plants do not need to accept low-purity outputs and high contamination as normal. The next opportunity is not another benchmark paper. It is better deployment, better plant integration, and better real-waste datasets.
Takeaways:
- Train on real waste, not only clean benchmark images.
- Measure purity, recovery, and miss rates together, not accuracy alone.
- Redesign feed systems so items arrive separated and stable.
- Start with narrow, high-value streams like PET, HDPE, or beverage containers.
- Track which failures come from AI, mechanics, and conveyors separately.
Charts:
References
[1] Barjoveanu, Gabriela, et al. “Does PET Trays Sorting Affect the Sustainability of Plastic Waste? An LCA and Cost-Revenue Approach.” Waste Management, vol. 167, 2023.
[2] Cheng, Tianhao, Daiki Kojima, Hao Hu, Hiroshi Onoda, and Andante Hadi Pandyaswargo. “Optimizing Waste Sorting for Sustainability: An AI-Powered Robotic Solution for Beverage Container Recycling.” Sustainability, vol. 16, no. 23, 2024, article 10155.
[3] Fotovvatikhah, Fatemeh, et al. “A Systematic Review of AI-Based Techniques for Automated Waste Classification.” Sensors, vol. 25, no. 10, 2025, article 3181.
[4] Giel, Robert, Mateusz Fiedeń, and Alicja Dąbrowska. “Real-Time Automatic Identification of Plastic Waste Streams for Advanced Waste Sorting Systems.” Sustainability, vol. 17, no. 5, 2025, article 2157.
[5] Lubongo, Colbert, et al. “Assessment of Performance and Challenges in Use of Commercial Automated Sorting Technology for Plastic Waste.” Recycling, vol. 7, no. 2, 2022, article 11.
[6] Lubongo, Colbert, et al. “Recent Developments in Technology for Sorting Plastic for Recycling: The Emergence of Artificial Intelligence and the Rise of the Robots.” Recycling, vol. 9, no. 4, 2024, article 59.
[7] Single, Steven, et al. “RealWaste: A Novel Real-Life Data Set for Landfill Waste Classification Using Deep Learning.” Information, vol. 14, no. 12, 2023, article 633.
[8] UNEP. Global Waste Management Outlook 2024. United Nations Environment Programme, 2024.
[9] Wilts, Henning, et al. “Artificial Intelligence in the Sorting of Municipal Waste as an Enabler of the Circular Economy.” Resources, vol. 10, no. 4, 2021, article 28.
[10] World Bank. What a Waste 2.0. World Bank, 2018.

Leave a comment