Section 1: The Problem
In 2023, landmines and explosive remnants of war caused at least 5,757 recorded casualties worldwide, 1,983 killed and 3,663 injured. Civilians made up 84% of the recorded casualties where status was known, and at least 1,498 child casualties were recorded. (Landmine Monitor; HRW)
This harm does not stop at injuries. Minefields freeze farmland, roads, housing, and basic services. A single “suspected hazardous area” can block rebuilding for years, because teams must prove land is safe, square meter by square meter. (Landmine Monitor)
The operational problem looks simple but is brutal in practice. You need to decide where to survey first, where to send technical teams, and where to spend scarce clearance hours. Traditional planning leans on historical incident points, community reports, and expert judgment. Those signals help, but they bias teams toward places with prior reporting, and they miss “silent” areas where mines exist but data is thin. (Hu et al.)
Section 2: What Research Shows
Modern risk mapping turns scattered inputs into ranked, map-based search plans. RELand, an interpretable machine learning system for Colombia, builds a gridded risk surface using historical mine events plus geographic features, then learns patterns that hold across municipalities. (Hu et al.)
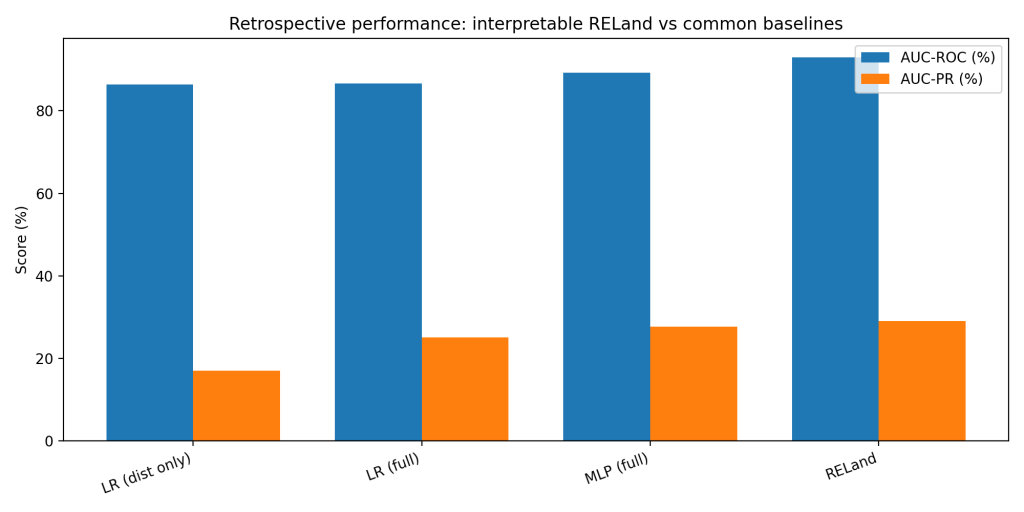
Retrospective results look strong, even against common baselines. In Antioquia (Colombia), a baseline logistic regression using only distance to the nearest historical mine event reached AUC-ROC 86.35 and AUC-PR 17.07. A fuller logistic regression reached AUC-ROC 86.54 and AUC-PR 25.11, and a neural net (MLP-full) reached AUC-ROC 89.25 and AUC-PR 27.73. RELand’s interpretable model reached AUC-ROC 92.90 and AUC-PR 29.03. (Hu et al.)
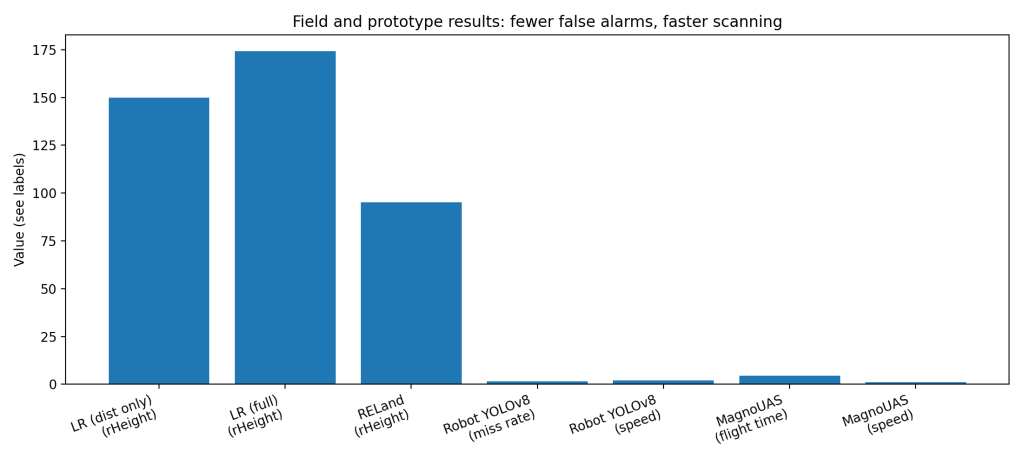
The more practical win is “less wasted digging.” RELand uses ranking metrics aimed at reducing false alarms during prioritization. In an example municipality map, the distance-only baseline had rHeight 149.8, while RELand had rHeight 95.14, meaning fewer false alarms before the team reaches all true positives in the ranked list. (Hu et al.)
Section 3: What the Real World Shows
Field hardware is also catching up. A 2024 system from the University of Florence integrated a YOLOv8 detector into a demining robot for real-time surface mine detection. It ran at about 2 FPS on a mobile device and missed at most 1.6% of targets in testing. The authors also report false positives over 30%, and they frame the system as a fast attention tool for a human operator rather than fully autonomous clearance. (Vivoli, Bertini, and Capineri)
On the survey side, UAV sensing platforms aim to cover ground faster and safer. A bespoke magnetometer drone (MagnoUAS) reported open-air field tests and described battery-limited operation, up to 4 minutes 30 seconds per full battery at low-speed flight around 1 m/s. That constraint matters because survey protocols must fit into short sorties, tight QA, and repeatable paths. (Kuru et al.)
Reviews in the last few years point to the same pattern: rapid progress in sensing and AI pipelines, but uneven translation into accredited, routine operations, especially when the goal moves from “support non-technical survey” to “support technical survey and clearance.” (GICHD; Thiruchittampalam et al.)
Section 4: The Implementation Gap
The biggest blocker is not model accuracy, it is operational trust under formal standards. Mine action requires defensible decisions because mistakes kill people. A model that ranks areas “high risk” must show how it works, how it fails, and how it behaves under local shifts in terrain, vegetation, conflict history, and reporting bias. RELand explicitly avoids being an automatic “safe/unsafe” system and treats its output as decision support for non-technical survey, partly because of these risks. (Hu et al.)
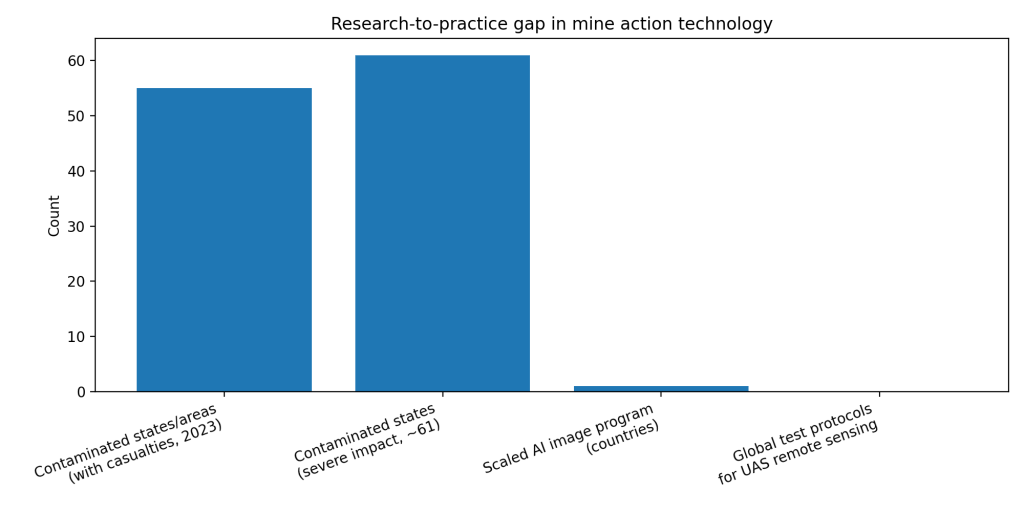
Testing and accreditation lag behind innovation. A 2024 GICHD innovation conference report notes that UAS remote-sensing tech has been under development for about 10 years, yet “no global testing and evaluation protocols” have been developed under IMAS or another standardization body. It also notes only “a few” national authorities have taken steps toward accreditation, and it flags unrealistic “silver bullet” expectations as a recurring problem among decision makers. (GICHD)
False alarms hit workflow capacity. In surface detection, a 30% false positive rate is not a small nuisance. It drives extra stops, rechecks, and human review load, and it changes how teams allocate scarce time and manage fatigue. The Florence group argues false positives are tolerable for a human-in-the-loop attention driver, but that is still a workflow redesign problem, not a plug-in upgrade. (Vivoli, Bertini, and Capineri)
Data is fragmented, sensitive, and hard to share. Training and validation need labeled ground truth, but demining data often sits across NGOs, national authorities, and donors with different formats and incentives. The GICHD report highlights the value of open, comparative, multi-modal datasets, and describes a seeded test area with around 150 diverse ERW items built to support benchmarking. That is the direction the sector needs, but it is still the exception. (GICHD)
Finally, incentives misalign. Funding cycles reward visible clearance outputs, not investment in data infrastructure, annotation, and model monitoring. When budgets tighten, the “extra” work to maintain AI systems is first on the chopping block, even if long-run efficiency improves. (GICHD; WIPO)
Section 5: Where It Actually Works
AI tools tend to work when they stay in the “decision support” lane and when they ship with a validation story. RELand’s approach is built around interpretability and robustness across municipalities, and it is being piloted with humanitarian demining partners for planning and prioritization rather than autonomous decision making. (Hu et al.)
Real-time vision also works when it is framed as assistive triage. The Florence robot system targets fast spotting of surface mines to guide a remote operator, accepting false positives to avoid misses, and focusing on lightweight deployment on common devices. That design matches real constraints in the field. (Vivoli, Bertini, and Capineri)
Section 6: The Opportunity
Mine action already runs on data. The opportunity is to standardize how data-driven tools earn trust, prove performance, and integrate into land release decisions.
Takeaways you can act on:
- Build shared benchmarks, seeded test fields, and open multi-modal datasets, so teams can compare tools on the same ground truth. (GICHD)
- Write accreditation-ready evaluation protocols under IMAS-aligned guidance, especially for UAS remote sensing used beyond non-technical survey. (GICHD; IMAS)
- Design for human workflow first: triage views, review queues, and “why this cell” explanations, not black-box heatmaps. (Hu et al.)
- Track operational metrics, not only AUC: false alarms per hectare, time-to-first-find, rHeight-style prioritization loss, and QA rework rates. (Hu et al.; Vivoli, Bertini, and Capineri)
- Fund maintenance: labeling, drift checks, retraining triggers, and field feedback loops as a standard line item, not a pilot add-on. (GICHD; WIPO)
References
[1] Landmine Monitor. Landmine Monitor 2024: The Impact, Casualties in 2023. International Campaign to Ban Landmines–Cluster Munition Coalition, 2024. PDF.
[2] Human Rights Watch. “Landmines: New Casualties Show Need to Support Treaty Ban.” 19 Nov. 2024.
[3] Hu, Yutong, et al. “RELand: Risk Estimation of Landmines via Interpretable Invariant Risk Minimization.” arXiv:2311.03115, 2023 (accessed via ar5iv HTML).
[4] Vivoli, Emanuele, Marco Bertini, and Lorenzo Capineri. “Deep Learning-Based Real-Time Detection of Surface Landmines Using Optical Imaging.” Remote Sensing, vol. 16, no. 4, 2024, article 677. https://doi.org/10.3390/rs16040677.
[5] Kuru, Kaya, et al. “Non-Invasive Detection of Landmines, Unexploded Ordnances and Improvised Explosive Devices Using Bespoke Unmanned Aerial Vehicles.” 2024. PDF hosted by University of Central Lancashire repository.
[6] Geneva International Centre for Humanitarian Demining (GICHD). “Innovation Conference Report: Test and Evaluation of UAS Based Remote-Sensing Technologies; Developments in AI Applications.” 2024. PDF.
[7] International Mine Action Standards (IMAS). “IMAS 07.11 Land Release.” mineactionstandards.org. Accessed 2026.
[8] Thiruchittampalam, Ranjith, et al. “Remote Sensing and Machine Learning-Based Detection of Mined Materials: A Systematic Review.” (Peer-reviewed systematic review). 2025. (Publisher page via Taylor & Francis).
[9] World Intellectual Property Organization (WIPO). SPARK: Technologies for Mine Action. WIPO Patent Analytics, 2025.

Leave a comment